J'ai toujours été intrigué par le fonctionnement des
ascenceurs. J'ai donc décidé d'en construire un avec mon
Mindstorms.
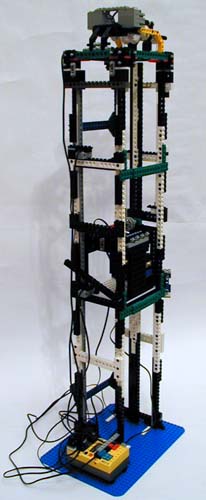
Il fait environ 1m de haut. Il est à l'échelle des figures
technic.
J'ai construit deux versions de la cabine. La première
version qui n'est pas affichées ici avait un système de freins
automatique.
La seconde a une porte coulissante actionnée par un moteur avec
un capteur optique comme les vrais ascenceurs.
La cabine est appelée à l'étage voulue avec l'envoi de message par la télécommande.
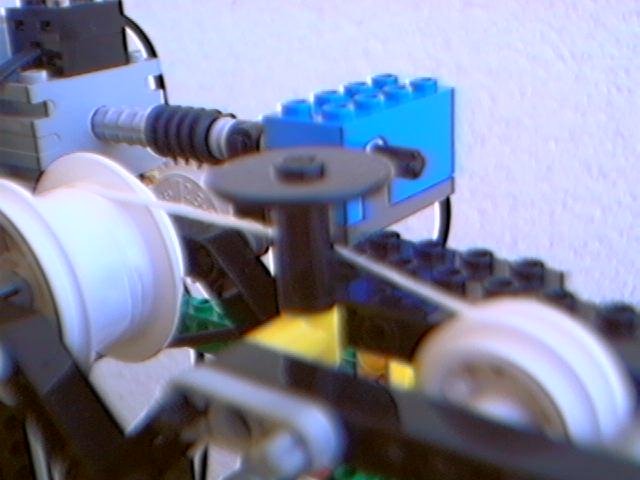
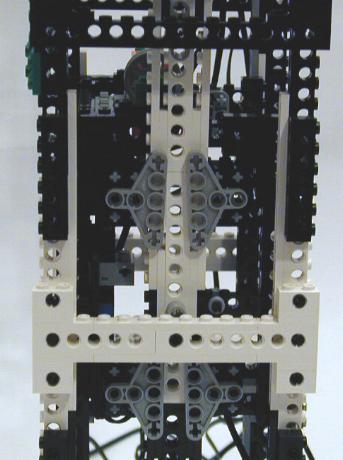
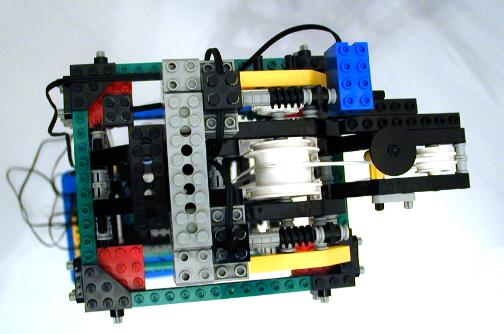
La cabine de l'ascenceur est déplacée par deux moteurs à travers une vis sans fin et un engrenage à debrayage. L'autre coté du fil est attaché à un contrepoids.
Le capteur de rotation a été utilisé pour des tests.
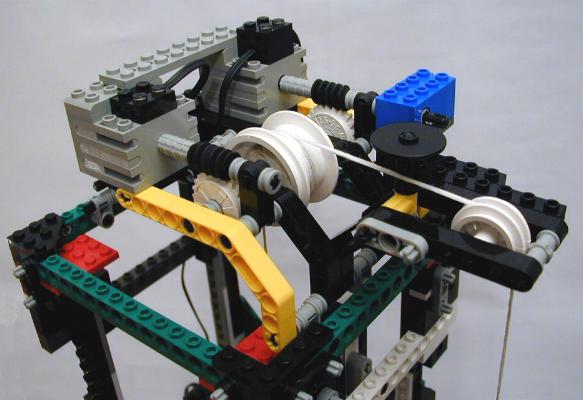
La cabine est attachée à un fil qui fait un tour autour de la roue attachée aux moteurs. La pièce cylindrique noir est là pour éviter que le fil ne se coince lui-même dans la roue.
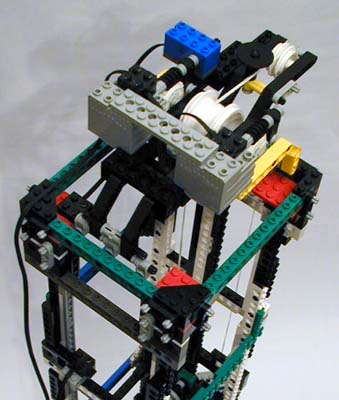
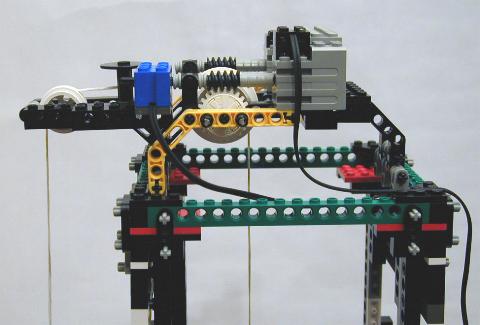
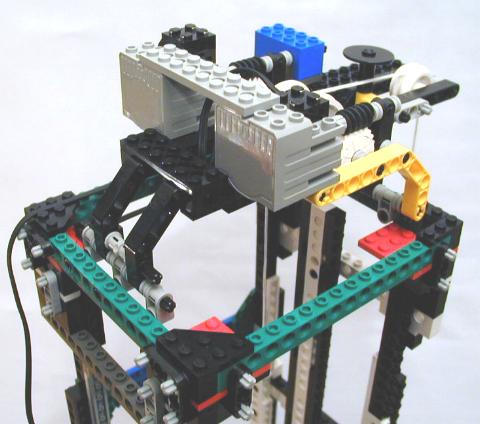
D'autres vue du sommet de la cage d'ascenceur.
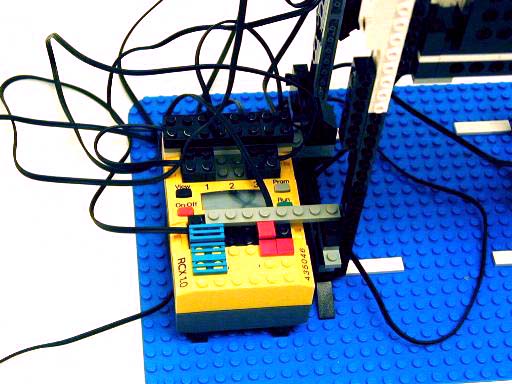
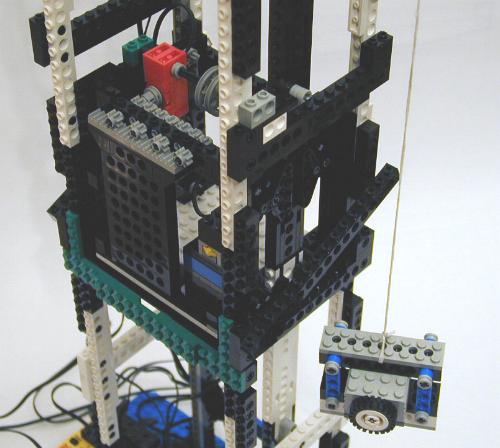
Les moteurs sont alimentés par un RCX.


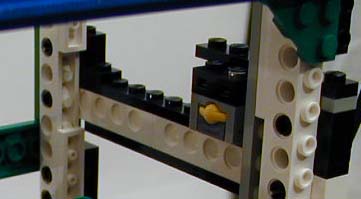
La cabine est guidée par un monorail.
Le micromoteur entraine une serie d'engrenages à 8 dents. Vous pouvez aussi comment le fil est attaché à la cabine et le contrepoids.
Vue de l'intérieur de la cabine. On distingue les deux capteurs de la porte et le capteur de lumière pour détecter la présence d'un objet pendant la fermeture de la porte.

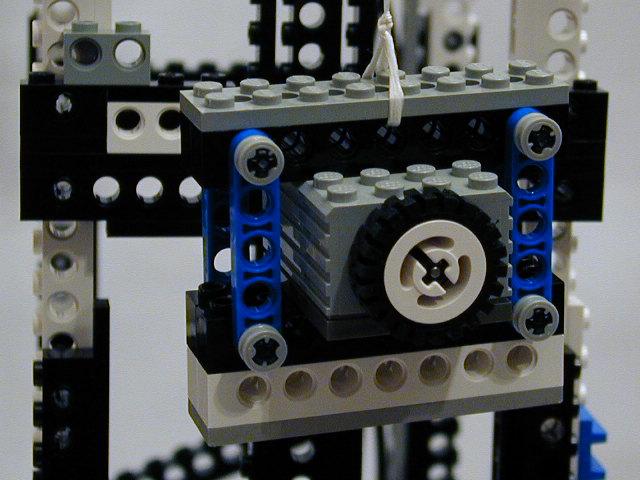
Une vue rapprochée du contrepoids fait avec un ancien moteur 9v.
Vues de l'intérieur de la cabine.

Un capteur de contact à chaque étage permet de savoir où se trouve